octomap::MapNode< TREETYPE > Class Template Reference
 Collaboration diagram for octomap::MapNode< TREETYPE >:
Collaboration diagram for octomap::MapNode< TREETYPE >: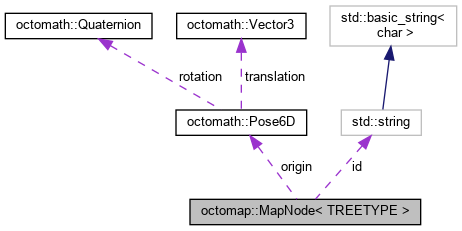
Public Types | |
| typedef TREETYPE | TreeType |
Public Member Functions | |
| Pointcloud | generatePointcloud () |
| std::string | getId () |
| TREETYPE * | getMap () |
| pose6d | getOrigin () |
| MapNode () | |
| MapNode (const Pointcloud &cloud, pose6d origin) | |
| MapNode (std::string filename, pose6d origin) | |
| MapNode (TREETYPE *node_map, pose6d origin) | |
| void | setId (std::string newid) |
| void | updateMap (const Pointcloud &cloud, point3d sensor_origin) |
| bool | writeMap (std::string filename) |
| ~MapNode () | |
Protected Member Functions | |
| void | clear () |
| bool | readMap (std::string filename) |
Protected Attributes | |
| std::string | id |
| TREETYPE * | node_map |
| pose6d | origin |
Member Typedef Documentation
◆ TreeType
template<class TREETYPE >
| typedef TREETYPE octomap::MapNode< TREETYPE >::TreeType |
Constructor & Destructor Documentation
◆ MapNode() [1/4]
template<class TREETYPE >
| octomap::MapNode< TREETYPE >::MapNode |
◆ MapNode() [2/4]
template<class TREETYPE >
| octomap::MapNode< TREETYPE >::MapNode | ( | TREETYPE * | node_map, |
| pose6d | origin | ||
| ) |
◆ MapNode() [3/4]
template<class TREETYPE >
| octomap::MapNode< TREETYPE >::MapNode | ( | std::string | filename, |
| pose6d | origin | ||
| ) |
◆ MapNode() [4/4]
template<class TREETYPE >
| octomap::MapNode< TREETYPE >::MapNode | ( | const Pointcloud & | cloud, |
| pose6d | origin | ||
| ) |
◆ ~MapNode()
template<class TREETYPE >
| octomap::MapNode< TREETYPE >::~MapNode |
Member Function Documentation
◆ clear()
template<class TREETYPE >
|
protected |
◆ generatePointcloud()
template<class TREETYPE >
| Pointcloud octomap::MapNode< TREETYPE >::generatePointcloud |
References octomap::Pointcloud::push_back().
◆ getId()
template<class TREETYPE >
|
inline |
References octomap::MapNode< TREETYPE >::id.
◆ getMap()
template<class TREETYPE >
|
inline |
References octomap::MapNode< TREETYPE >::node_map.
◆ getOrigin()
template<class TREETYPE >
|
inline |
References octomap::MapNode< TREETYPE >::origin.
◆ readMap()
template<class TREETYPE >
|
protected |
Referenced by octomap::MapNode< TREETYPE >::MapNode().
◆ setId()
template<class TREETYPE >
|
inline |
◆ updateMap()
template<class TREETYPE >
| void octomap::MapNode< TREETYPE >::updateMap | ( | const Pointcloud & | cloud, |
| point3d | sensor_origin | ||
| ) |
◆ writeMap()
template<class TREETYPE >
| bool octomap::MapNode< TREETYPE >::writeMap | ( | std::string | filename | ) |
Field Documentation
◆ id
template<class TREETYPE >
|
protected |
Referenced by octomap::MapNode< TREETYPE >::getId().
◆ node_map
template<class TREETYPE >
|
protected |
Referenced by octomap::MapNode< TREETYPE >::getMap().
◆ origin
template<class TREETYPE >
|
protected |
Referenced by octomap::MapNode< TREETYPE >::getOrigin(), and octomap::MapNode< TREETYPE >::MapNode().
The documentation for this class was generated from the following files:
- include/octomap/MapNode.h
- include/octomap/MapNode.hxx
