A 3D scan as Pointcloud, performed from a Pose6D. More...
 Collaboration diagram for octomap::ScanNode:
Collaboration diagram for octomap::ScanNode: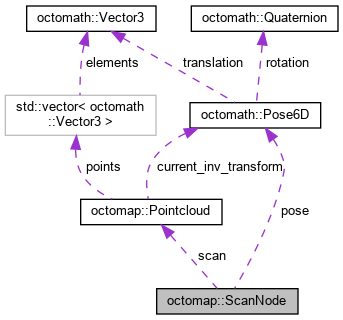
Public Member Functions | |
| bool | operator== (const ScanNode &other) |
| std::istream & | readBinary (std::istream &s) |
| std::istream & | readPoseASCII (std::istream &s) |
| ScanNode () | |
| ScanNode (Pointcloud *_scan, pose6d _pose, unsigned int _id) | |
| std::ostream & | writeBinary (std::ostream &s) const |
| std::ostream & | writePoseASCII (std::ostream &s) const |
| ~ScanNode () | |
Data Fields | |
| unsigned int | id |
| pose6d | pose |
| 6D pose from which the scan was performed More... | |
| Pointcloud * | scan |
Detailed Description
A 3D scan as Pointcloud, performed from a Pose6D.
Constructor & Destructor Documentation
◆ ScanNode() [1/2]
|
inline |
◆ ScanNode() [2/2]
|
inline |
◆ ~ScanNode()
| octomap::ScanNode::~ScanNode | ( | ) |
References scan.
Member Function Documentation
◆ operator==()
◆ readBinary()
| std::istream & octomap::ScanNode::readBinary | ( | std::istream & | s | ) |
References pose, octomap::Pointcloud::readBinary(), octomath::Pose6D::readBinary(), and scan.
Referenced by octomap::ScanGraph::readBinary().
◆ readPoseASCII()
| std::istream & octomap::ScanNode::readPoseASCII | ( | std::istream & | s | ) |
References OCTOMAP_ERROR, pose, octomath::Vector3::read(), octomath::Pose6D::rot(), and octomath::Pose6D::trans().
◆ writeBinary()
| std::ostream & octomap::ScanNode::writeBinary | ( | std::ostream & | s | ) | const |
References id, pose, scan, octomap::Pointcloud::writeBinary(), and octomath::Pose6D::writeBinary().
◆ writePoseASCII()
| std::ostream & octomap::ScanNode::writePoseASCII | ( | std::ostream & | s | ) | const |
Field Documentation
◆ id
| unsigned int octomap::ScanNode::id |
◆ pose
| pose6d octomap::ScanNode::pose |
6D pose from which the scan was performed
Referenced by octomap::ScanGraph::addEdge(), octomap::ScanGraph::connectPrevious(), octomap::OccupancyOcTreeBase< OcTreeNodeStamped >::insertPointCloud(), main(), readBinary(), octomap::ScanGraph::readNodePosesASCII(), octomap::ScanGraph::readPlainASCII(), readPoseASCII(), writeBinary(), and writePoseASCII().
◆ scan
| Pointcloud* octomap::ScanNode::scan |
The documentation for this class was generated from the following files:
- include/octomap/ScanGraph.h
- src/ScanGraph.cpp
