octomap main map data structure, stores 3D occupancy grid map in an OcTree. More...
 Inheritance diagram for octomap::OcTree:
Inheritance diagram for octomap::OcTree: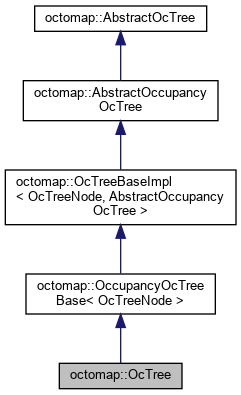 Collaboration diagram for octomap::OcTree:
Collaboration diagram for octomap::OcTree: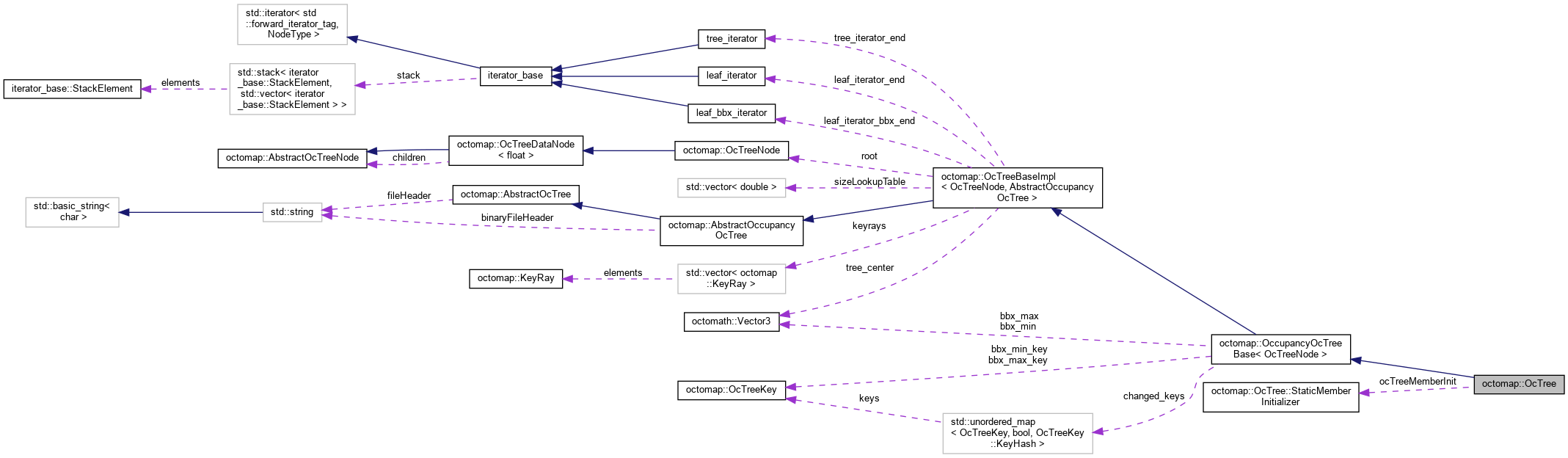
Data Structures | |
| class | StaticMemberInitializer |
| Static member object which ensures that this OcTree's prototype ends up in the classIDMapping only once. More... | |
Public Types | |
| typedef leaf_iterator | iterator |
| typedef OcTreeNode | NodeType |
| Make the templated NODE type available from the outside. More... | |
Public Member Functions | |
| OcTreeKey | adjustKeyAtDepth (const OcTreeKey &key, unsigned int depth) const |
| Adjusts a 3D key from the lowest level to correspond to a higher depth (by shifting the key values) More... | |
| key_type | adjustKeyAtDepth (key_type key, unsigned int depth) const |
| Adjusts a single key value from the lowest level to correspond to a higher depth (by shifting the key value) More... | |
| bool | bbxSet () const |
| iterator | begin (unsigned char maxDepth=0) const |
| leaf_iterator | begin_leafs (unsigned char maxDepth=0) const |
| leaf_bbx_iterator | begin_leafs_bbx (const OcTreeKey &min, const OcTreeKey &max, unsigned char maxDepth=0) const |
| leaf_bbx_iterator | begin_leafs_bbx (const point3d &min, const point3d &max, unsigned char maxDepth=0) const |
| tree_iterator | begin_tree (unsigned char maxDepth=0) const |
| size_t | calcNumNodes () const |
| Traverses the tree to calculate the total number of nodes. More... | |
| virtual bool | castRay (const point3d &origin, const point3d &direction, point3d &end, bool ignoreUnknownCells=false, double maxRange=-1.0) const |
| Performs raycasting in 3d, similar to computeRay(). More... | |
| KeyBoolMap::const_iterator | changedKeysBegin () const |
| Iterator to traverse all keys of changed nodes. More... | |
| KeyBoolMap::const_iterator | changedKeysEnd () const |
| Iterator to traverse all keys of changed nodes. More... | |
| void | clear () |
| Deletes the complete tree structure. More... | |
| void | clearKeyRays () |
| Clear KeyRay vector to minimize unneeded memory. More... | |
| void | computeDiscreteUpdate (const Pointcloud &scan, const octomap::point3d &origin, KeySet &free_cells, KeySet &occupied_cells, double maxrange) |
| Helper for insertPointCloud(). More... | |
| bool | computeRay (const point3d &origin, const point3d &end, std::vector< point3d > &ray) |
| Traces a ray from origin to end (excluding), returning the coordinates of all nodes traversed by the beam. More... | |
| bool | computeRayKeys (const point3d &origin, const point3d &end, KeyRay &ray) const |
| Traces a ray from origin to end (excluding), returning an OcTreeKey of all nodes traversed by the beam. More... | |
| void | computeUpdate (const Pointcloud &scan, const octomap::point3d &origin, KeySet &free_cells, KeySet &occupied_cells, double maxrange) |
| Helper for insertPointCloud(). More... | |
| OcTreeKey | coordToKey (const point3d &coord) const |
| Converts from a 3D coordinate into a 3D addressing key. More... | |
| OcTreeKey | coordToKey (const point3d &coord, unsigned depth) const |
| Converts from a 3D coordinate into a 3D addressing key at a given depth. More... | |
| key_type | coordToKey (double coordinate) const |
| Converts from a single coordinate into a discrete key. More... | |
| key_type | coordToKey (double coordinate, unsigned depth) const |
| Converts from a single coordinate into a discrete key at a given depth. More... | |
| OcTreeKey | coordToKey (double x, double y, double z) const |
| Converts from a 3D coordinate into a 3D addressing key. More... | |
| OcTreeKey | coordToKey (double x, double y, double z, unsigned depth) const |
| Converts from a 3D coordinate into a 3D addressing key at a given depth. More... | |
| bool | coordToKeyChecked (const point3d &coord, OcTreeKey &key) const |
| Converts a 3D coordinate into a 3D OcTreeKey, with boundary checking. More... | |
| bool | coordToKeyChecked (const point3d &coord, unsigned depth, OcTreeKey &key) const |
| Converts a 3D coordinate into a 3D OcTreeKey at a certain depth, with boundary checking. More... | |
| bool | coordToKeyChecked (double coordinate, key_type &key) const |
| Converts a single coordinate into a discrete addressing key, with boundary checking. More... | |
| bool | coordToKeyChecked (double coordinate, unsigned depth, key_type &key) const |
| Converts a single coordinate into a discrete addressing key, with boundary checking. More... | |
| bool | coordToKeyChecked (double x, double y, double z, OcTreeKey &key) const |
| Converts a 3D coordinate into a 3D OcTreeKey, with boundary checking. More... | |
| bool | coordToKeyChecked (double x, double y, double z, unsigned depth, OcTreeKey &key) const |
| Converts a 3D coordinate into a 3D OcTreeKey at a certain depth, with boundary checking. More... | |
| OcTree * | create () const |
| virtual constructor: creates a new object of same type (Covariant return type requires an up-to-date compiler) More... | |
| OcTreeNode * | createNodeChild (OcTreeNode *node, unsigned int childIdx) |
| Creates (allocates) the i-th child of the node. More... | |
| bool | deleteNode (const OcTreeKey &key, unsigned int depth=0) |
| Delete a node (if exists) given an addressing key. More... | |
| bool | deleteNode (const point3d &value, unsigned int depth=0) |
| Delete a node (if exists) given a 3d point. More... | |
| bool | deleteNode (double x, double y, double z, unsigned int depth=0) |
| Delete a node (if exists) given a 3d point. More... | |
| void | deleteNodeChild (OcTreeNode *node, unsigned int childIdx) |
| Deletes the i-th child of the node. More... | |
| void | enableChangeDetection (bool enable) |
| track or ignore changes while inserting scans (default: ignore) More... | |
| const iterator | end () const |
| const leaf_iterator | end_leafs () const |
| const leaf_bbx_iterator | end_leafs_bbx () const |
| const tree_iterator | end_tree () const |
| virtual void | expand () |
| Expands all pruned nodes (reverse of prune()) More... | |
| virtual void | expandNode (OcTreeNode *node) |
| Expands a node (reverse of pruning): All children are created and their occupancy probability is set to the node's value. More... | |
| point3d | getBBXBounds () const |
| point3d | getBBXCenter () const |
| point3d | getBBXMax () const |
| point3d | getBBXMin () const |
| double | getClampingThresMax () const |
| float | getClampingThresMaxLog () const |
| double | getClampingThresMin () const |
| float | getClampingThresMinLog () const |
| virtual void | getMetricMax (double &x, double &y, double &z) |
| maximum value of the bounding box of all known space in x, y, z More... | |
| void | getMetricMax (double &x, double &y, double &z) const |
| maximum value of the bounding box of all known space in x, y, z More... | |
| virtual void | getMetricMin (double &x, double &y, double &z) |
| minimum value of the bounding box of all known space in x, y, z More... | |
| void | getMetricMin (double &x, double &y, double &z) const |
| minimum value of the bounding box of all known space in x, y, z More... | |
| virtual void | getMetricSize (double &x, double &y, double &z) |
| Size of OcTree (all known space) in meters for x, y and z dimension. More... | |
| virtual void | getMetricSize (double &x, double &y, double &z) const |
| Size of OcTree (all known space) in meters for x, y and z dimension. More... | |
| const OcTreeNode * | getNodeChild (const OcTreeNode *node, unsigned int childIdx) const |
| OcTreeNode * | getNodeChild (OcTreeNode *node, unsigned int childIdx) const |
| double | getNodeSize (unsigned depth) const |
| bool | getNormals (const point3d &point, std::vector< point3d > &normals, bool unknownStatus=true) const |
| Performs a step of the marching cubes surface reconstruction algorithm to retrieve the normal of the triangles that fall in the cube formed by the voxels located at the vertex of a given voxel. More... | |
| size_t | getNumLeafNodes () const |
| Traverses the tree to calculate the total number of leaf nodes. More... | |
| double | getOccupancyThres () const |
| float | getOccupancyThresLog () const |
| double | getProbHit () const |
| float | getProbHitLog () const |
| double | getProbMiss () const |
| float | getProbMissLog () const |
| virtual bool | getRayIntersection (const point3d &origin, const point3d &direction, const point3d ¢er, point3d &intersection, double delta=0.0) const |
| Retrieves the entry point of a ray into a voxel. More... | |
| double | getResolution () const |
| virtual double | getResolution () const =0 |
| OcTreeNode * | getRoot () const |
| unsigned int | getTreeDepth () const |
| std::string | getTreeType () const |
| returns actual class name as string for identification More... | |
| std::string | getTreeType () const |
| void | getUnknownLeafCenters (point3d_list &node_centers, point3d pmin, point3d pmax, unsigned int depth=0) const |
| return centers of leafs that do NOT exist (but could) in a given bounding box More... | |
| bool | inBBX (const OcTreeKey &key) const |
| bool | inBBX (const point3d &p) const |
| virtual void | insertPointCloud (const Pointcloud &scan, const octomap::point3d &sensor_origin, double maxrange=-1., bool lazy_eval=false, bool discretize=false) |
| Integrate a Pointcloud (in global reference frame), parallelized with OpenMP. More... | |
| virtual void | insertPointCloud (const Pointcloud &scan, const point3d &sensor_origin, const pose6d &frame_origin, double maxrange=-1., bool lazy_eval=false, bool discretize=false) |
| Integrate a 3d scan (transform scan before tree update), parallelized with OpenMP. More... | |
| virtual void | insertPointCloud (const ScanNode &scan, double maxrange=-1., bool lazy_eval=false, bool discretize=false) |
| Insert a 3d scan (given as a ScanNode) into the tree, parallelized with OpenMP. More... | |
| virtual void | insertPointCloudRays (const Pointcloud &scan, const point3d &sensor_origin, double maxrange=-1., bool lazy_eval=false) |
| Integrate a Pointcloud (in global reference frame), parallelized with OpenMP. More... | |
| virtual bool | insertRay (const point3d &origin, const point3d &end, double maxrange=-1.0, bool lazy_eval=false) |
| Insert one ray between origin and end into the tree. More... | |
| virtual void | integrateHit (OcTreeNode *occupancyNode) const |
| integrate a "hit" measurement according to the tree's sensor model More... | |
| virtual void | integrateMiss (OcTreeNode *occupancyNode) const |
| integrate a "miss" measurement according to the tree's sensor model More... | |
| bool | isChangeDetectionEnabled () const |
| bool | isNodeAtThreshold (const OcTreeNode &occupancyNode) const |
| queries whether a node is at the clamping threshold according to the tree's parameter More... | |
| bool | isNodeAtThreshold (const OcTreeNode *occupancyNode) const |
| queries whether a node is at the clamping threshold according to the tree's parameter More... | |
| virtual bool | isNodeCollapsible (const OcTreeNode *node) const |
| A node is collapsible if all children exist, don't have children of their own and have the same occupancy value. More... | |
| bool | isNodeOccupied (const OcTreeNode &occupancyNode) const |
| queries whether a node is occupied according to the tree's parameter for "occupancy" More... | |
| bool | isNodeOccupied (const OcTreeNode *occupancyNode) const |
| queries whether a node is occupied according to the tree's parameter for "occupancy" More... | |
| point3d | keyToCoord (const OcTreeKey &key) const |
| converts from an addressing key at the lowest tree level into a coordinate corresponding to the key's center More... | |
| point3d | keyToCoord (const OcTreeKey &key, unsigned depth) const |
| converts from an addressing key at a given depth into a coordinate corresponding to the key's center More... | |
| double | keyToCoord (key_type key) const |
| converts from a discrete key at the lowest tree level into a coordinate corresponding to the key's center More... | |
| double | keyToCoord (key_type key, unsigned depth) const |
| converts from a discrete key at a given depth into a coordinate corresponding to the key's center More... | |
| unsigned long long | memoryFullGrid () const |
| virtual size_t | memoryUsage () const |
| virtual size_t | memoryUsage () const =0 |
| virtual size_t | memoryUsageNode () const |
| virtual size_t | memoryUsageNode () const =0 |
| bool | nodeChildExists (const OcTreeNode *node, unsigned int childIdx) const |
| Safe test if node has a child at index childIdx. More... | |
| bool | nodeHasChildren (const OcTreeNode *node) const |
| Safe test if node has any children. More... | |
| virtual void | nodeToMaxLikelihood (OcTreeNode &occupancyNode) const |
| converts the node to the maximum likelihood value according to the tree's parameter for "occupancy" More... | |
| virtual void | nodeToMaxLikelihood (OcTreeNode *occupancyNode) const |
| converts the node to the maximum likelihood value according to the tree's parameter for "occupancy" More... | |
| size_t | numChangesDetected () const |
| Number of changes since last reset. More... | |
| OcTree (double resolution) | |
| Default constructor, sets resolution of leafs. More... | |
| OcTree (std::string _filename) | |
| Reads an OcTree from a binary file. More... | |
| bool | operator== (const OcTreeBaseImpl< OcTreeNode, AbstractOccupancyOcTree > &rhs) const |
| Comparison between two octrees, all meta data, all nodes, and the structure must be identical. More... | |
| virtual void | prune () |
| Lossless compression of the octree: A node will replace all of its eight children if they have identical values. More... | |
| virtual bool | pruneNode (OcTreeNode *node) |
| Prunes a node when it is collapsible. More... | |
| bool | readBinary (const std::string &filename) |
| Reads OcTree from a binary file. More... | |
| bool | readBinary (std::istream &s) |
| Reads an OcTree from an input stream. More... | |
| std::istream & | readBinaryData (std::istream &s) |
| Reads only the data (=complete tree structure) from the input stream. More... | |
| std::istream & | readBinaryNode (std::istream &s, OcTreeNode *node) |
| Read node from binary stream (max-likelihood value), recursively continue with all children. More... | |
| std::istream & | readData (std::istream &s) |
| Read all nodes from the input stream (without file header), for this the tree needs to be already created. More... | |
| void | resetChangeDetection () |
| Reset the set of changed keys. Call this after you obtained all changed nodes. More... | |
| OcTreeNode * | search (const OcTreeKey &key, unsigned int depth=0) const |
| Search a node at specified depth given an addressing key (depth=0: search full tree depth) You need to check if the returned node is NULL, since it can be in unknown space. More... | |
| OcTreeNode * | search (const point3d &value, unsigned int depth=0) const |
| Search node at specified depth given a 3d point (depth=0: search full tree depth) You need to check if the returned node is NULL, since it can be in unknown space. More... | |
| OcTreeNode * | search (double x, double y, double z, unsigned int depth=0) const |
| Search node at specified depth given a 3d point (depth=0: search full tree depth). More... | |
| void | setBBXMax (const point3d &max) |
| sets the maximum for a query bounding box to use More... | |
| void | setBBXMin (const point3d &min) |
| sets the minimum for a query bounding box to use More... | |
| void | setClampingThresMax (double thresProb) |
| sets the maximum threshold for occupancy clamping (sensor model) More... | |
| void | setClampingThresMin (double thresProb) |
| sets the minimum threshold for occupancy clamping (sensor model) More... | |
| virtual OcTreeNode * | setNodeValue (const OcTreeKey &key, float log_odds_value, bool lazy_eval=false) |
| Set log_odds value of voxel to log_odds_value. More... | |
| virtual OcTreeNode * | setNodeValue (const point3d &value, float log_odds_value, bool lazy_eval=false) |
| Set log_odds value of voxel to log_odds_value. More... | |
| virtual OcTreeNode * | setNodeValue (double x, double y, double z, float log_odds_value, bool lazy_eval=false) |
| Set log_odds value of voxel to log_odds_value. More... | |
| void | setOccupancyThres (double prob) |
| sets the threshold for occupancy (sensor model) More... | |
| void | setProbHit (double prob) |
| sets the probability for a "hit" (will be converted to logodds) - sensor model More... | |
| void | setProbMiss (double prob) |
| sets the probability for a "miss" (will be converted to logodds) - sensor model More... | |
| void | setResolution (double r) |
| Change the resolution of the octree, scaling all voxels. This will not preserve the (metric) scale! More... | |
| virtual size_t | size () const |
| virtual size_t | size () const =0 |
| void | swapContent (OcTreeBaseImpl< OcTreeNode, AbstractOccupancyOcTree > &rhs) |
| Swap contents of two octrees, i.e., only the underlying pointer / tree structure. More... | |
| virtual void | toMaxLikelihood () |
| Creates the maximum likelihood map by calling toMaxLikelihood on all tree nodes, setting their occupancy to the corresponding occupancy thresholds. More... | |
| void | updateInnerOccupancy () |
| Updates the occupancy of all inner nodes to reflect their children's occupancy. More... | |
| virtual OcTreeNode * | updateNode (const OcTreeKey &key, bool occupied, bool lazy_eval=false) |
| Integrate occupancy measurement. More... | |
| virtual OcTreeNode * | updateNode (const OcTreeKey &key, float log_odds_update, bool lazy_eval=false) |
| Manipulate log_odds value of a voxel by changing it by log_odds_update (relative). More... | |
| virtual OcTreeNode * | updateNode (const point3d &value, bool occupied, bool lazy_eval=false) |
| Integrate occupancy measurement. More... | |
| virtual OcTreeNode * | updateNode (const point3d &value, float log_odds_update, bool lazy_eval=false) |
| Manipulate log_odds value of a voxel by changing it by log_odds_update (relative). More... | |
| virtual OcTreeNode * | updateNode (double x, double y, double z, bool occupied, bool lazy_eval=false) |
| Integrate occupancy measurement. More... | |
| virtual OcTreeNode * | updateNode (double x, double y, double z, float log_odds_update, bool lazy_eval=false) |
| Manipulate log_odds value of a voxel by changing it by log_odds_update (relative). More... | |
| virtual void | updateNodeLogOdds (OcTreeNode *occupancyNode, const float &update) const |
| update logodds value of node by adding to the current value. More... | |
| void | useBBXLimit (bool enable) |
| use or ignore BBX limit (default: ignore) More... | |
| double | volume () |
| bool | write (const std::string &filename) const |
| Write file header and complete tree to file (serialization) More... | |
| bool | write (std::ostream &s) const |
| Write file header and complete tree to stream (serialization) More... | |
| bool | writeBinary (const std::string &filename) |
| Writes OcTree to a binary file using writeBinary(). More... | |
| bool | writeBinary (std::ostream &s) |
| Writes compressed maximum likelihood OcTree to a binary stream. More... | |
| bool | writeBinaryConst (const std::string &filename) const |
| Writes OcTree to a binary file using writeBinaryConst(). More... | |
| bool | writeBinaryConst (std::ostream &s) const |
| Writes the maximum likelihood OcTree to a binary stream (const variant). More... | |
| std::ostream & | writeBinaryData (std::ostream &s) const |
| Writes the data of the tree (without header) to the stream, recursively calling writeBinaryNode (starting with root) More... | |
| std::ostream & | writeBinaryNode (std::ostream &s, const OcTreeNode *node) const |
| Write node to binary stream (max-likelihood value), recursively continue with all children. More... | |
| std::ostream & | writeData (std::ostream &s) const |
| Write complete state of tree to stream (without file header) unmodified. Pruning the tree first produces smaller files (lossless compression) More... | |
| virtual | ~OcTree () |
Static Public Member Functions | |
| static AbstractOcTree * | createTree (const std::string id, double res) |
| Creates a certain OcTree (factory pattern) More... | |
| static AbstractOcTree * | read (const std::string &filename) |
| Read the file header, create the appropriate class and deserialize. More... | |
| static AbstractOcTree * | read (std::istream &s) |
| Read the file header, create the appropriate class and deserialize. This creates a new octree which you need to delete yourself. More... | |
Protected Member Functions | |
| void | allocNodeChildren (OcTreeNode *node) |
| void | calcMinMax () |
| recalculates min and max in x, y, z. Does nothing when tree size didn't change. More... | |
| void | calcNumNodesRecurs (OcTreeNode *node, size_t &num_nodes) const |
| void | deleteNodeRecurs (OcTreeNode *node) |
| Recursively delete a node and all children. Deallocates memory but does NOT set the node ptr to NULL nor updates tree size. More... | |
| bool | deleteNodeRecurs (OcTreeNode *node, unsigned int depth, unsigned int max_depth, const OcTreeKey &key) |
| recursive call of deleteNode() More... | |
| void | expandRecurs (OcTreeNode *node, unsigned int depth, unsigned int max_depth) |
| recursive call of expand() More... | |
| size_t | getNumLeafNodesRecurs (const OcTreeNode *parent) const |
| void | init () |
| initialize non-trivial members, helper for constructors More... | |
| bool | integrateMissOnRay (const point3d &origin, const point3d &end, bool lazy_eval=false) |
| Traces a ray from origin to end and updates all voxels on the way as free. More... | |
| void | pruneRecurs (OcTreeNode *node, unsigned int depth, unsigned int max_depth, unsigned int &num_pruned) |
| recursive call of prune() More... | |
| bool | readBinaryLegacyHeader (std::istream &s, unsigned int &size, double &res) |
| Try to read the old binary format for conversion, will be removed in the future. More... | |
| std::istream & | readNodesRecurs (OcTreeNode *, std::istream &s) |
| recursive call of readData() More... | |
| OcTreeNode * | setNodeValueRecurs (OcTreeNode *node, bool node_just_created, const OcTreeKey &key, unsigned int depth, const float &log_odds_value, bool lazy_eval=false) |
| void | toMaxLikelihoodRecurs (OcTreeNode *node, unsigned int depth, unsigned int max_depth) |
| void | updateInnerOccupancyRecurs (OcTreeNode *node, unsigned int depth) |
| OcTreeNode * | updateNodeRecurs (OcTreeNode *node, bool node_just_created, const OcTreeKey &key, unsigned int depth, const float &log_odds_update, bool lazy_eval=false) |
| std::ostream & | writeNodesRecurs (const OcTreeNode *, std::ostream &s) const |
| recursive call of writeData() More... | |
Static Protected Member Functions | |
| static bool | readHeader (std::istream &s, std::string &id, unsigned &size, double &res) |
| static void | registerTreeType (AbstractOcTree *tree) |
Protected Attributes | |
| point3d | bbx_max |
| OcTreeKey | bbx_max_key |
| point3d | bbx_min |
| OcTreeKey | bbx_min_key |
| KeyBoolMap | changed_keys |
| Set of leaf keys (lowest level) which changed since last resetChangeDetection. More... | |
| float | clamping_thres_max |
| float | clamping_thres_min |
| std::vector< KeyRay > | keyrays |
| data structure for ray casting, array for multithreading More... | |
| const leaf_bbx_iterator | leaf_iterator_bbx_end |
| const leaf_iterator | leaf_iterator_end |
| double | max_value [3] |
| max in x, y, z More... | |
| double | min_value [3] |
| min in x, y, z contains the size of a voxel at level i (0: root node). tree_depth+1 levels (incl. 0) More... | |
| float | occ_prob_thres_log |
| float | prob_hit_log |
| float | prob_miss_log |
| double | resolution |
| in meters More... | |
| double | resolution_factor |
| = 1. / resolution More... | |
| OcTreeNode * | root |
| Pointer to the root NODE, NULL for empty tree. More... | |
| bool | size_changed |
| std::vector< double > | sizeLookupTable |
| point3d | tree_center |
| const unsigned int | tree_depth |
| Maximum tree depth is fixed to 16 currently. More... | |
| const tree_iterator | tree_iterator_end |
| const unsigned int | tree_max_val |
| size_t | tree_size |
| number of nodes in tree flag to denote whether the octree extent changed (for lazy min/max eval) More... | |
| bool | use_bbx_limit |
| use bounding box for queries (needs to be set)? More... | |
| bool | use_change_detection |
Static Protected Attributes | |
| static const std::string | binaryFileHeader = "# Octomap OcTree binary file" |
| static const std::string | fileHeader = "# Octomap OcTree file" |
| static StaticMemberInitializer | ocTreeMemberInit |
| to ensure static initialization (only once) More... | |
Detailed Description
octomap main map data structure, stores 3D occupancy grid map in an OcTree.
Basic functionality is implemented in OcTreeBase.
Member Typedef Documentation
◆ iterator
|
inherited |
◆ NodeType
|
inherited |
Make the templated NODE type available from the outside.
Constructor & Destructor Documentation
◆ OcTree() [1/2]
| octomap::OcTree::OcTree | ( | double | resolution | ) |
Default constructor, sets resolution of leafs.
References octomap::OcTree::StaticMemberInitializer::ensureLinking(), and ocTreeMemberInit.
Referenced by create(), and octomap::OcTree::StaticMemberInitializer::StaticMemberInitializer().
◆ OcTree() [2/2]
| octomap::OcTree::OcTree | ( | std::string | _filename | ) |
Reads an OcTree from a binary file.
- Parameters
-
_filename
References octomap::AbstractOccupancyOcTree::readBinary().
◆ ~OcTree()
|
inlinevirtual |
Member Function Documentation
◆ adjustKeyAtDepth() [1/2]
|
inlineinherited |
Adjusts a 3D key from the lowest level to correspond to a higher depth (by shifting the key values)
- Parameters
-
key Input key, at the lowest tree level depth Target depth level for the new key
- Returns
- Key for the new depth level
◆ adjustKeyAtDepth() [2/2]
|
inherited |
Adjusts a single key value from the lowest level to correspond to a higher depth (by shifting the key value)
- Parameters
-
key Input key, at the lowest tree level depth Target depth level for the new key
- Returns
- Key for the new depth level
◆ allocNodeChildren()
|
protectedinherited |
◆ bbxSet()
|
inlineinherited |
◆ begin()
|
inlineinherited |
- Returns
- beginning of the tree as leaf iterator
◆ begin_leafs()
|
inlineinherited |
- Returns
- beginning of the tree as leaf iterator
◆ begin_leafs_bbx() [1/2]
|
inlineinherited |
- Returns
- beginning of the tree as leaf iterator in a bounding box
◆ begin_leafs_bbx() [2/2]
|
inlineinherited |
- Returns
- beginning of the tree as leaf iterator in a bounding box
◆ begin_tree()
|
inlineinherited |
- Returns
- beginning of the tree as iterator to all nodes (incl. inner)
◆ calcMinMax()
|
protectedinherited |
recalculates min and max in x, y, z. Does nothing when tree size didn't change.
◆ calcNumNodes()
|
inherited |
Traverses the tree to calculate the total number of nodes.
◆ calcNumNodesRecurs()
|
protectedinherited |
◆ castRay()
|
virtualinherited |
Performs raycasting in 3d, similar to computeRay().
Can be called in parallel e.g. with OpenMP for a speedup.
A ray is cast from 'origin' with a given direction, the first non-free cell is returned in 'end' (as center coordinate). This could also be the origin node if it is occupied or unknown. castRay() returns true if an occupied node was hit by the raycast. If the raycast returns false you can search() the node at 'end' and see whether it's unknown space.
- Parameters
-
[in] origin starting coordinate of ray [in] direction A vector pointing in the direction of the raycast (NOT a point in space). Does not need to be normalized. [out] end returns the center of the last cell on the ray. If the function returns true, it is occupied. [in] ignoreUnknownCells whether unknown cells are ignored (= treated as free). If false (default), the raycast aborts when an unknown cell is hit and returns false. [in] maxRange Maximum range after which the raycast is aborted (<= 0: no limit, default)
- Returns
- true if an occupied cell was hit, false if the maximum range or octree bounds are reached, or if an unknown node was hit.
-------— see OcTreeBase::computeRayKeys --------—
◆ changedKeysBegin()
|
inlineinherited |
Iterator to traverse all keys of changed nodes.
you need to enableChangeDetection() first. Here, an OcTreeKey always refers to a node at the lowest tree level (its size is the minimum tree resolution)
◆ changedKeysEnd()
|
inlineinherited |
Iterator to traverse all keys of changed nodes.
◆ clear()
|
virtualinherited |
Deletes the complete tree structure.
Implements octomap::AbstractOcTree.
◆ clearKeyRays()
|
inlineinherited |
Clear KeyRay vector to minimize unneeded memory.
This is only useful for the StaticMemberInitializer classes, don't call it for an octree that is actually used.
◆ computeDiscreteUpdate()
|
inherited |
Helper for insertPointCloud().
Computes all octree nodes affected by the point cloud integration at once. Here, occupied nodes have a preference over free ones. This function first discretizes the scan with the octree grid, which results in fewer raycasts (=speedup) but a slightly different result than computeUpdate().
- Parameters
-
scan point cloud measurement to be integrated origin origin of the sensor for ray casting free_cells keys of nodes to be cleared occupied_cells keys of nodes to be marked occupied maxrange maximum range for raycasting (-1: unlimited)
◆ computeRay()
|
inherited |
Traces a ray from origin to end (excluding), returning the coordinates of all nodes traversed by the beam.
You still need to check if a node at that coordinate exists (e.g. with search()).
- Note
- : use the faster computeRayKeys method if possible.
- Parameters
-
origin start coordinate of ray end end coordinate of ray ray KeyRay structure that holds the keys of all nodes traversed by the ray, excluding "end"
- Returns
- Success of operation. Returning false usually means that one of the coordinates is out of the OcTree's range
◆ computeRayKeys()
|
inherited |
Traces a ray from origin to end (excluding), returning an OcTreeKey of all nodes traversed by the beam.
You still need to check if a node at that coordinate exists (e.g. with search()).
- Parameters
-
origin start coordinate of ray end end coordinate of ray ray KeyRay structure that holds the keys of all nodes traversed by the ray, excluding "end"
- Returns
- Success of operation. Returning false usually means that one of the coordinates is out of the OcTree's range
◆ computeUpdate()
|
inherited |
Helper for insertPointCloud().
Computes all octree nodes affected by the point cloud integration at once. Here, occupied nodes have a preference over free ones.
- Parameters
-
scan point cloud measurement to be integrated origin origin of the sensor for ray casting free_cells keys of nodes to be cleared occupied_cells keys of nodes to be marked occupied maxrange maximum range for raycasting (-1: unlimited)
◆ coordToKey() [1/6]
|
inlineinherited |
Converts from a 3D coordinate into a 3D addressing key.
◆ coordToKey() [2/6]
|
inlineinherited |
Converts from a 3D coordinate into a 3D addressing key at a given depth.
◆ coordToKey() [3/6]
|
inlineinherited |
Converts from a single coordinate into a discrete key.
◆ coordToKey() [4/6]
|
inlineinherited |
Converts from a single coordinate into a discrete key at a given depth.
◆ coordToKey() [5/6]
|
inlineinherited |
Converts from a 3D coordinate into a 3D addressing key.
◆ coordToKey() [6/6]
|
inlineinherited |
Converts from a 3D coordinate into a 3D addressing key at a given depth.
◆ coordToKeyChecked() [1/6]
|
inherited |
Converts a 3D coordinate into a 3D OcTreeKey, with boundary checking.
- Parameters
-
coord 3d coordinate of a point key values that will be computed, an array of fixed size 3.
- Returns
- true if point is within the octree (valid), false otherwise
◆ coordToKeyChecked() [2/6]
|
inherited |
Converts a 3D coordinate into a 3D OcTreeKey at a certain depth, with boundary checking.
- Parameters
-
coord 3d coordinate of a point depth level of the key from the top key values that will be computed, an array of fixed size 3.
- Returns
- true if point is within the octree (valid), false otherwise
◆ coordToKeyChecked() [3/6]
|
inherited |
Converts a single coordinate into a discrete addressing key, with boundary checking.
- Parameters
-
coordinate 3d coordinate of a point key discrete 16 bit adressing key, result
- Returns
- true if coordinate is within the octree bounds (valid), false otherwise
◆ coordToKeyChecked() [4/6]
|
inherited |
Converts a single coordinate into a discrete addressing key, with boundary checking.
- Parameters
-
coordinate 3d coordinate of a point depth level of the key from the top key discrete 16 bit adressing key, result
- Returns
- true if coordinate is within the octree bounds (valid), false otherwise
◆ coordToKeyChecked() [5/6]
|
inherited |
Converts a 3D coordinate into a 3D OcTreeKey, with boundary checking.
- Parameters
-
x y z key values that will be computed, an array of fixed size 3.
- Returns
- true if point is within the octree (valid), false otherwise
◆ coordToKeyChecked() [6/6]
|
inherited |
Converts a 3D coordinate into a 3D OcTreeKey at a certain depth, with boundary checking.
- Parameters
-
x y z depth level of the key from the top key values that will be computed, an array of fixed size 3.
- Returns
- true if point is within the octree (valid), false otherwise
◆ create()
|
inlinevirtual |
virtual constructor: creates a new object of same type (Covariant return type requires an up-to-date compiler)
Implements octomap::AbstractOcTree.
References OcTree(), and octomap::OcTreeBaseImpl< OcTreeNode, AbstractOccupancyOcTree >::resolution.
◆ createNodeChild()
|
inherited |
Creates (allocates) the i-th child of the node.
- Returns
- ptr to newly create NODE
◆ createTree()
|
staticinherited |
Creates a certain OcTree (factory pattern)
- Returns
- pointer to newly created OcTree (empty). NULL if the ID is unknown!
References OCTOMAP_ERROR, and octomap::AbstractOcTree::setResolution().
Referenced by octomap::AbstractOcTree::read().
◆ deleteNode() [1/3]
|
inherited |
Delete a node (if exists) given an addressing key.
Will always delete at the lowest level unless depth !=0, and expand pruned inner nodes as needed. Pruned nodes at level "depth" will directly be deleted as a whole.
◆ deleteNode() [2/3]
|
inherited |
Delete a node (if exists) given a 3d point.
Will always delete at the lowest level unless depth !=0, and expand pruned inner nodes as needed. Pruned nodes at level "depth" will directly be deleted as a whole.
◆ deleteNode() [3/3]
|
inherited |
Delete a node (if exists) given a 3d point.
Will always delete at the lowest level unless depth !=0, and expand pruned inner nodes as needed. Pruned nodes at level "depth" will directly be deleted as a whole.
◆ deleteNodeChild()
|
inherited |
Deletes the i-th child of the node.
◆ deleteNodeRecurs() [1/2]
|
protectedinherited |
Recursively delete a node and all children. Deallocates memory but does NOT set the node ptr to NULL nor updates tree size.
◆ deleteNodeRecurs() [2/2]
|
protectedinherited |
recursive call of deleteNode()
◆ enableChangeDetection()
|
inlineinherited |
track or ignore changes while inserting scans (default: ignore)
◆ end()
|
inlineinherited |
- Returns
- end of the tree as leaf iterator
◆ end_leafs()
|
inlineinherited |
- Returns
- end of the tree as leaf iterator
◆ end_leafs_bbx()
|
inlineinherited |
- Returns
- end of the tree as leaf iterator in a bounding box
◆ end_tree()
|
inlineinherited |
- Returns
- end of the tree as iterator to all nodes (incl. inner)
◆ expand()
|
virtualinherited |
Expands all pruned nodes (reverse of prune())
- Note
- This is an expensive operation, especially when the tree is nearly empty!
Implements octomap::AbstractOcTree.
◆ expandNode()
|
virtualinherited |
Expands a node (reverse of pruning): All children are created and their occupancy probability is set to the node's value.
You need to verify that this is indeed a pruned node (i.e. not a leaf at the lowest level)
◆ expandRecurs()
|
protectedinherited |
recursive call of expand()
◆ getBBXBounds()
|
inherited |
◆ getBBXCenter()
|
inherited |
◆ getBBXMax()
|
inlineinherited |
- Returns
- the currently set maximum for bounding box queries, if set
◆ getBBXMin()
|
inlineinherited |
- Returns
- the currently set minimum for bounding box queries, if set
◆ getClampingThresMax()
|
inlineinherited |
- Returns
- maximum threshold for occupancy clamping in the sensor model (probability)
References octomap::AbstractOccupancyOcTree::clamping_thres_max, and octomap::probability().
Referenced by main().
◆ getClampingThresMaxLog()
|
inlineinherited |
- Returns
- maximum threshold for occupancy clamping in the sensor model (logodds)
References octomap::AbstractOccupancyOcTree::clamping_thres_max.
◆ getClampingThresMin()
|
inlineinherited |
- Returns
- minimum threshold for occupancy clamping in the sensor model (probability)
References octomap::AbstractOccupancyOcTree::clamping_thres_min, and octomap::probability().
Referenced by main().
◆ getClampingThresMinLog()
|
inlineinherited |
- Returns
- minimum threshold for occupancy clamping in the sensor model (logodds)
References octomap::AbstractOccupancyOcTree::clamping_thres_min.
◆ getMetricMax() [1/2]
|
virtualinherited |
maximum value of the bounding box of all known space in x, y, z
Implements octomap::AbstractOcTree.
◆ getMetricMax() [2/2]
|
virtualinherited |
maximum value of the bounding box of all known space in x, y, z
Implements octomap::AbstractOcTree.
◆ getMetricMin() [1/2]
|
virtualinherited |
minimum value of the bounding box of all known space in x, y, z
Implements octomap::AbstractOcTree.
◆ getMetricMin() [2/2]
|
virtualinherited |
minimum value of the bounding box of all known space in x, y, z
Implements octomap::AbstractOcTree.
◆ getMetricSize() [1/2]
|
virtualinherited |
Size of OcTree (all known space) in meters for x, y and z dimension.
Implements octomap::AbstractOcTree.
◆ getMetricSize() [2/2]
|
virtualinherited |
Size of OcTree (all known space) in meters for x, y and z dimension.
◆ getNodeChild() [1/2]
|
inherited |
- Returns
- const ptr to child number childIdx of node
◆ getNodeChild() [2/2]
|
inherited |
- Returns
- ptr to child number childIdx of node
◆ getNodeSize()
|
inlineinherited |
◆ getNormals()
|
inherited |
Performs a step of the marching cubes surface reconstruction algorithm to retrieve the normal of the triangles that fall in the cube formed by the voxels located at the vertex of a given voxel.
- Parameters
-
[in] point voxel for which retrieve the normals [out] normals normals of the triangles [in] unknownStatus consider unknown cells as free (false) or occupied (default, true).
- Returns
- True if the input voxel is known in the occupancy grid, and false if it is unknown.
◆ getNumLeafNodes()
|
inherited |
Traverses the tree to calculate the total number of leaf nodes.
◆ getNumLeafNodesRecurs()
|
protectedinherited |
◆ getOccupancyThres()
|
inlineinherited |
- Returns
- threshold (probability) for occupancy - sensor model
References octomap::AbstractOccupancyOcTree::occ_prob_thres_log, and octomap::probability().
◆ getOccupancyThresLog()
|
inlineinherited |
- Returns
- threshold (logodds) for occupancy - sensor model
References octomap::AbstractOccupancyOcTree::occ_prob_thres_log.
◆ getProbHit()
|
inlineinherited |
- Returns
- probability for a "hit" in the sensor model (probability)
References octomap::AbstractOccupancyOcTree::prob_hit_log, and octomap::probability().
Referenced by main().
◆ getProbHitLog()
|
inlineinherited |
- Returns
- probability for a "hit" in the sensor model (logodds)
References octomap::AbstractOccupancyOcTree::prob_hit_log.
◆ getProbMiss()
|
inlineinherited |
- Returns
- probability for a "miss" in the sensor model (probability)
References octomap::AbstractOccupancyOcTree::prob_miss_log, and octomap::probability().
Referenced by main().
◆ getProbMissLog()
|
inlineinherited |
- Returns
- probability for a "miss" in the sensor model (logodds)
References octomap::AbstractOccupancyOcTree::prob_miss_log.
◆ getRayIntersection()
|
virtualinherited |
Retrieves the entry point of a ray into a voxel.
This is the closest intersection point of the ray originating from origin and a plane of the axis aligned cube.
- Parameters
-
[in] origin Starting point of ray [in] direction A vector pointing in the direction of the raycast. Does not need to be normalized. [in] center The center of the voxel where the ray terminated. This is the output of castRay. [out] intersection The entry point of the ray into the voxel, on the voxel surface. [in] delta A small increment to avoid ambiguity of beeing exactly on a voxel surface. A positive value will get the point out of the hit voxel, while a negative valuewill get it inside.
- Returns
- Whether or not an intesection point has been found. Either, the ray never cross the voxel or the ray is exactly parallel to the only surface it intersect.
◆ getResolution() [1/2]
|
inlineinherited |
◆ getResolution() [2/2]
|
pure virtualinherited |
Referenced by main(), octomap::AbstractOcTree::write(), and octomap::AbstractOccupancyOcTree::writeBinaryConst().
◆ getRoot()
|
inlineinherited |
- Returns
- Pointer to the root node of the tree. This pointer should not be modified or deleted externally, the OcTree manages its memory itself. In an empty tree, root is NULL.
◆ getTreeDepth()
|
inlineinherited |
◆ getTreeType() [1/2]
|
inlinevirtual |
returns actual class name as string for identification
Implements octomap::AbstractOcTree.
◆ getTreeType() [2/2]
|
inlineinherited |
◆ getUnknownLeafCenters()
|
inherited |
return centers of leafs that do NOT exist (but could) in a given bounding box
◆ inBBX() [1/2]
|
inherited |
- Returns
- true if key is in the currently set bounding box
◆ inBBX() [2/2]
|
inherited |
- Returns
- true if point is in the currently set bounding box
◆ init()
|
protectedinherited |
initialize non-trivial members, helper for constructors
◆ insertPointCloud() [1/3]
|
virtualinherited |
Integrate a Pointcloud (in global reference frame), parallelized with OpenMP.
Special care is taken that each voxel in the map is updated only once, and occupied nodes have a preference over free ones. This avoids holes in the floor from mutual deletion and is more efficient than the plain ray insertion in insertPointCloudRays().
- Note
- replaces insertScan()
- Parameters
-
scan Pointcloud (measurement endpoints), in global reference frame sensor_origin measurement origin in global reference frame maxrange maximum range for how long individual beams are inserted (default -1: complete beam) lazy_eval whether update of inner nodes is omitted after the update (default: false). This speeds up the insertion, but you need to call updateInnerOccupancy() when done. discretize whether the scan is discretized first into octree key cells (default: false). This reduces the number of raycasts using computeDiscreteUpdate(), resulting in a potential speedup.*
◆ insertPointCloud() [2/3]
|
virtualinherited |
Integrate a 3d scan (transform scan before tree update), parallelized with OpenMP.
Special care is taken that each voxel in the map is updated only once, and occupied nodes have a preference over free ones. This avoids holes in the floor from mutual deletion and is more efficient than the plain ray insertion in insertPointCloudRays().
- Note
- replaces insertScan()
- Parameters
-
scan Pointcloud (measurement endpoints) relative to frame origin sensor_origin origin of sensor relative to frame origin frame_origin origin of reference frame, determines transform to be applied to cloud and sensor origin maxrange maximum range for how long individual beams are inserted (default -1: complete beam) lazy_eval whether update of inner nodes is omitted after the update (default: false). This speeds up the insertion, but you need to call updateInnerOccupancy() when done. discretize whether the scan is discretized first into octree key cells (default: false). This reduces the number of raycasts using computeDiscreteUpdate(), resulting in a potential speedup.*
◆ insertPointCloud() [3/3]
|
virtualinherited |
Insert a 3d scan (given as a ScanNode) into the tree, parallelized with OpenMP.
- Note
- replaces insertScan
- Parameters
-
scan ScanNode contains Pointcloud data and frame/sensor origin maxrange maximum range for how long individual beams are inserted (default -1: complete beam) lazy_eval whether the tree is left 'dirty' after the update (default: false). This speeds up the insertion by not updating inner nodes, but you need to call updateInnerOccupancy() when done. discretize whether the scan is discretized first into octree key cells (default: false). This reduces the number of raycasts using computeDiscreteUpdate(), resulting in a potential speedup.
◆ insertPointCloudRays()
|
virtualinherited |
Integrate a Pointcloud (in global reference frame), parallelized with OpenMP.
This function simply inserts all rays of the point clouds as batch operation. Discretization effects can lead to the deletion of occupied space, it is usually recommended to use insertPointCloud() instead.
- Parameters
-
scan Pointcloud (measurement endpoints), in global reference frame sensor_origin measurement origin in global reference frame maxrange maximum range for how long individual beams are inserted (default -1: complete beam) lazy_eval whether update of inner nodes is omitted after the update (default: false). This speeds up the insertion, but you need to call updateInnerOccupancy() when done.
◆ insertRay()
|
virtualinherited |
Insert one ray between origin and end into the tree.
integrateMissOnRay() is called for the ray, the end point is updated as occupied. It is usually more efficient to insert complete pointcloudsm with insertPointCloud() or insertPointCloudRays().
- Parameters
-
origin origin of sensor in global coordinates end endpoint of measurement in global coordinates maxrange maximum range after which the raycast should be aborted lazy_eval whether update of inner nodes is omitted after the update (default: false). This speeds up the insertion, but you need to call updateInnerOccupancy() when done.
- Returns
- success of operation
◆ integrateHit()
|
virtualinherited |
integrate a "hit" measurement according to the tree's sensor model
◆ integrateMiss()
|
virtualinherited |
integrate a "miss" measurement according to the tree's sensor model
◆ integrateMissOnRay()
|
inlineprotectedinherited |
Traces a ray from origin to end and updates all voxels on the way as free.
The volume containing "end" is not updated.
◆ isChangeDetectionEnabled()
|
inlineinherited |
◆ isNodeAtThreshold() [1/2]
|
inlineinherited |
queries whether a node is at the clamping threshold according to the tree's parameter
References octomap::OcTreeNode::getLogOdds().
◆ isNodeAtThreshold() [2/2]
|
inlineinherited |
queries whether a node is at the clamping threshold according to the tree's parameter
References octomap::OcTreeNode::getLogOdds().
Referenced by calcThresholdedNodes().
◆ isNodeCollapsible()
|
virtualinherited |
A node is collapsible if all children exist, don't have children of their own and have the same occupancy value.
◆ isNodeOccupied() [1/2]
|
inlineinherited |
queries whether a node is occupied according to the tree's parameter for "occupancy"
References octomap::OcTreeNode::getLogOdds().
◆ isNodeOccupied() [2/2]
|
inlineinherited |
queries whether a node is occupied according to the tree's parameter for "occupancy"
References octomap::OcTreeNode::getLogOdds().
Referenced by octomap::OcTreeStamped::degradeOutdatedNodes(), getLeafNodesRecurs(), main(), and printChanges().
◆ keyToCoord() [1/4]
|
inlineinherited |
converts from an addressing key at the lowest tree level into a coordinate corresponding to the key's center
◆ keyToCoord() [2/4]
|
inlineinherited |
converts from an addressing key at a given depth into a coordinate corresponding to the key's center
◆ keyToCoord() [3/4]
|
inlineinherited |
converts from a discrete key at the lowest tree level into a coordinate corresponding to the key's center
◆ keyToCoord() [4/4]
|
inherited |
converts from a discrete key at a given depth into a coordinate corresponding to the key's center
◆ memoryFullGrid()
|
inherited |
- Returns
- Memory usage of a full grid of the same size as the OcTree in bytes (for comparison)
- Note
- this can be larger than the adressable memory - size_t may not be enough to hold it!
◆ memoryUsage() [1/2]
|
virtualinherited |
- Returns
- Memory usage of the complete octree in bytes (may vary between architectures)
◆ memoryUsage() [2/2]
|
pure virtualinherited |
◆ memoryUsageNode() [1/2]
|
inlinevirtualinherited |
- Returns
- Memory usage of a single octree node
◆ memoryUsageNode() [2/2]
|
pure virtualinherited |
◆ nodeChildExists()
|
inherited |
Safe test if node has a child at index childIdx.
First tests if there are any children. Replaces node->childExists(...)
- Returns
- true if the child at childIdx exists
◆ nodeHasChildren()
|
inherited |
Safe test if node has any children.
Replaces node->hasChildren(...)
- Returns
- true if node has at least one child
◆ nodeToMaxLikelihood() [1/2]
|
virtualinherited |
converts the node to the maximum likelihood value according to the tree's parameter for "occupancy"
◆ nodeToMaxLikelihood() [2/2]
|
virtualinherited |
converts the node to the maximum likelihood value according to the tree's parameter for "occupancy"
◆ numChangesDetected()
|
inlineinherited |
Number of changes since last reset.
◆ operator==()
|
inherited |
Comparison between two octrees, all meta data, all nodes, and the structure must be identical.
◆ prune()
|
virtualinherited |
Lossless compression of the octree: A node will replace all of its eight children if they have identical values.
You usually don't have to call prune() after a regular occupancy update, updateNode() incrementally prunes all affected nodes.
Implements octomap::AbstractOcTree.
◆ pruneNode()
|
virtualinherited |
Prunes a node when it is collapsible.
- Returns
- true if pruning was successful
◆ pruneRecurs()
|
protectedinherited |
recursive call of prune()
◆ read() [1/2]
|
staticinherited |
Read the file header, create the appropriate class and deserialize.
This creates a new octree which you need to delete yourself. If you expect or requre a specific kind of octree, use dynamic_cast afterwards:
References OCTOMAP_ERROR_STR.
◆ read() [2/2]
|
staticinherited |
Read the file header, create the appropriate class and deserialize. This creates a new octree which you need to delete yourself.
References octomap::AbstractOcTree::createTree(), octomap::AbstractOcTree::fileHeader, OCTOMAP_DEBUG_STR, OCTOMAP_ERROR_STR, octomap::AbstractOcTree::readData(), octomap::AbstractOcTree::readHeader(), and octomap::AbstractOcTree::size().
◆ readBinary() [1/2]
|
inherited |
Reads OcTree from a binary file.
Existing nodes of the tree are deleted before the tree is read.
- Returns
- success of operation
References OCTOMAP_ERROR_STR, and octomap::AbstractOccupancyOcTree::readBinary().
◆ readBinary() [2/2]
|
inherited |
Reads an OcTree from an input stream.
Existing nodes of the tree are deleted before the tree is read.
- Returns
- success of operation
References octomap::AbstractOccupancyOcTree::binaryFileHeader, octomap::AbstractOcTree::clear(), OCTOMAP_DEBUG_STR, OCTOMAP_ERROR, OCTOMAP_ERROR_STR, OCTOMAP_WARNING_STR, octomap::AbstractOccupancyOcTree::readBinaryData(), octomap::AbstractOccupancyOcTree::readBinaryLegacyHeader(), octomap::AbstractOcTree::readHeader(), octomap::AbstractOcTree::setResolution(), and octomap::AbstractOcTree::size().
Referenced by main(), OcTree(), and octomap::AbstractOccupancyOcTree::readBinary().
◆ readBinaryData()
|
virtualinherited |
Reads only the data (=complete tree structure) from the input stream.
The tree needs to be constructed with the proper header information beforehand, see readBinary().
Implements octomap::AbstractOccupancyOcTree.
◆ readBinaryLegacyHeader()
|
protectedinherited |
Try to read the old binary format for conversion, will be removed in the future.
References octomap::AbstractOcTree::clear(), OCTOMAP_ERROR, OCTOMAP_ERROR_STR, OCTOMAP_WARNING_STR, and octomap::AbstractOcTree::size().
Referenced by octomap::AbstractOccupancyOcTree::readBinary().
◆ readBinaryNode()
|
inherited |
Read node from binary stream (max-likelihood value), recursively continue with all children.
This will set the log_odds_occupancy value of all leaves to either free or occupied.
◆ readData()
|
virtualinherited |
Read all nodes from the input stream (without file header), for this the tree needs to be already created.
For general file IO, you should probably use AbstractOcTree::read() instead.
Implements octomap::AbstractOcTree.
◆ readHeader()
|
staticprotectedinherited |
References OCTOMAP_ERROR_STR, OCTOMAP_WARNING, OCTOMAP_WARNING_STR, and octomap::AbstractOcTree::size().
Referenced by octomap::AbstractOcTree::read(), and octomap::AbstractOccupancyOcTree::readBinary().
◆ readNodesRecurs()
|
protectedinherited |
recursive call of readData()
◆ registerTreeType()
|
staticprotectedinherited |
References octomap::AbstractOcTree::getTreeType().
Referenced by octomap::OcTree::StaticMemberInitializer::StaticMemberInitializer(), octomap::CountingOcTree::StaticMemberInitializer::StaticMemberInitializer(), octomap::OcTreeStamped::StaticMemberInitializer::StaticMemberInitializer(), and octomap::ColorOcTree::StaticMemberInitializer::StaticMemberInitializer().
◆ resetChangeDetection()
|
inlineinherited |
Reset the set of changed keys. Call this after you obtained all changed nodes.
◆ search() [1/3]
|
inherited |
Search a node at specified depth given an addressing key (depth=0: search full tree depth) You need to check if the returned node is NULL, since it can be in unknown space.
- Returns
- pointer to node if found, NULL otherwise
◆ search() [2/3]
|
inherited |
Search node at specified depth given a 3d point (depth=0: search full tree depth) You need to check if the returned node is NULL, since it can be in unknown space.
- Returns
- pointer to node if found, NULL otherwise
◆ search() [3/3]
|
inherited |
Search node at specified depth given a 3d point (depth=0: search full tree depth).
You need to check if the returned node is NULL, since it can be in unknown space.
- Returns
- pointer to node if found, NULL otherwise
◆ setBBXMax()
|
inherited |
sets the maximum for a query bounding box to use
◆ setBBXMin()
|
inherited |
sets the minimum for a query bounding box to use
◆ setClampingThresMax()
|
inlineinherited |
sets the maximum threshold for occupancy clamping (sensor model)
References octomap::AbstractOccupancyOcTree::clamping_thres_max, and octomap::logodds().
Referenced by octomap::AbstractOccupancyOcTree::AbstractOccupancyOcTree(), and main().
◆ setClampingThresMin()
|
inlineinherited |
sets the minimum threshold for occupancy clamping (sensor model)
References octomap::AbstractOccupancyOcTree::clamping_thres_min, and octomap::logodds().
Referenced by octomap::AbstractOccupancyOcTree::AbstractOccupancyOcTree(), and main().
◆ setNodeValue() [1/3]
|
virtualinherited |
Set log_odds value of voxel to log_odds_value.
This only works if key is at the lowest octree level
- Parameters
-
key OcTreeKey of the NODE that is to be updated log_odds_value value to be set as the log_odds value of the node lazy_eval whether update of inner nodes is omitted after the update (default: false). This speeds up the insertion, but you need to call updateInnerOccupancy() when done.
- Returns
- pointer to the updated NODE
◆ setNodeValue() [2/3]
|
virtualinherited |
Set log_odds value of voxel to log_odds_value.
Looks up the OcTreeKey corresponding to the coordinate and then calls setNodeValue() with it.
- Parameters
-
value 3d coordinate of the NODE that is to be updated log_odds_value value to be set as the log_odds value of the node lazy_eval whether update of inner nodes is omitted after the update (default: false). This speeds up the insertion, but you need to call updateInnerOccupancy() when done.
- Returns
- pointer to the updated NODE
◆ setNodeValue() [3/3]
|
virtualinherited |
Set log_odds value of voxel to log_odds_value.
Looks up the OcTreeKey corresponding to the coordinate and then calls setNodeValue() with it.
- Parameters
-
x y z log_odds_value value to be set as the log_odds value of the node lazy_eval whether update of inner nodes is omitted after the update (default: false). This speeds up the insertion, but you need to call updateInnerOccupancy() when done.
- Returns
- pointer to the updated NODE
◆ setNodeValueRecurs()
|
protectedinherited |
◆ setOccupancyThres()
|
inlineinherited |
sets the threshold for occupancy (sensor model)
References octomap::logodds(), and octomap::AbstractOccupancyOcTree::occ_prob_thres_log.
Referenced by octomap::AbstractOccupancyOcTree::AbstractOccupancyOcTree().
◆ setProbHit()
|
inlineinherited |
sets the probability for a "hit" (will be converted to logodds) - sensor model
References octomap::logodds(), and octomap::AbstractOccupancyOcTree::prob_hit_log.
Referenced by octomap::AbstractOccupancyOcTree::AbstractOccupancyOcTree(), and main().
◆ setProbMiss()
|
inlineinherited |
sets the probability for a "miss" (will be converted to logodds) - sensor model
References octomap::logodds(), and octomap::AbstractOccupancyOcTree::prob_miss_log.
Referenced by octomap::AbstractOccupancyOcTree::AbstractOccupancyOcTree(), and main().
◆ setResolution()
|
virtualinherited |
Change the resolution of the octree, scaling all voxels. This will not preserve the (metric) scale!
Implements octomap::AbstractOcTree.
◆ size() [1/2]
|
inlinevirtualinherited |
- Returns
- The number of nodes in the tree
◆ size() [2/2]
|
pure virtualinherited |
◆ swapContent()
|
inherited |
Swap contents of two octrees, i.e., only the underlying pointer / tree structure.
You have to ensure yourself that the metadata (resolution etc) matches. No memory is cleared in this function
◆ toMaxLikelihood()
|
virtualinherited |
Creates the maximum likelihood map by calling toMaxLikelihood on all tree nodes, setting their occupancy to the corresponding occupancy thresholds.
This enables a very efficient compression if you call prune() afterwards.
Implements octomap::AbstractOccupancyOcTree.
◆ toMaxLikelihoodRecurs()
|
protectedinherited |
◆ updateInnerOccupancy()
|
inherited |
Updates the occupancy of all inner nodes to reflect their children's occupancy.
If you performed batch-updates with lazy evaluation enabled, you must call this before any queries to ensure correct multi-resolution behavior.
◆ updateInnerOccupancyRecurs()
|
protectedinherited |
◆ updateNode() [1/6]
|
virtualinherited |
Integrate occupancy measurement.
- Parameters
-
key OcTreeKey of the NODE that is to be updated occupied true if the node was measured occupied, else false lazy_eval whether update of inner nodes is omitted after the update (default: false). This speeds up the insertion, but you need to call updateInnerOccupancy() when done.
- Returns
- pointer to the updated NODE
Implements octomap::AbstractOccupancyOcTree.
◆ updateNode() [2/6]
|
virtualinherited |
Manipulate log_odds value of a voxel by changing it by log_odds_update (relative).
This only works if key is at the lowest octree level
- Parameters
-
key OcTreeKey of the NODE that is to be updated log_odds_update value to be added (+) to log_odds value of node lazy_eval whether update of inner nodes is omitted after the update (default: false). This speeds up the insertion, but you need to call updateInnerOccupancy() when done.
- Returns
- pointer to the updated NODE
Implements octomap::AbstractOccupancyOcTree.
◆ updateNode() [3/6]
|
virtualinherited |
Integrate occupancy measurement.
Looks up the OcTreeKey corresponding to the coordinate and then calls udpateNode() with it.
- Parameters
-
value 3d coordinate of the NODE that is to be updated occupied true if the node was measured occupied, else false lazy_eval whether update of inner nodes is omitted after the update (default: false). This speeds up the insertion, but you need to call updateInnerOccupancy() when done.
- Returns
- pointer to the updated NODE
Implements octomap::AbstractOccupancyOcTree.
◆ updateNode() [4/6]
|
virtualinherited |
Manipulate log_odds value of a voxel by changing it by log_odds_update (relative).
Looks up the OcTreeKey corresponding to the coordinate and then calls updateNode() with it.
- Parameters
-
value 3d coordinate of the NODE that is to be updated log_odds_update value to be added (+) to log_odds value of node lazy_eval whether update of inner nodes is omitted after the update (default: false). This speeds up the insertion, but you need to call updateInnerOccupancy() when done.
- Returns
- pointer to the updated NODE
Implements octomap::AbstractOccupancyOcTree.
◆ updateNode() [5/6]
|
virtualinherited |
Integrate occupancy measurement.
Looks up the OcTreeKey corresponding to the coordinate and then calls udpateNode() with it.
- Parameters
-
x y z occupied true if the node was measured occupied, else false lazy_eval whether update of inner nodes is omitted after the update (default: false). This speeds up the insertion, but you need to call updateInnerOccupancy() when done.
- Returns
- pointer to the updated NODE
◆ updateNode() [6/6]
|
virtualinherited |
Manipulate log_odds value of a voxel by changing it by log_odds_update (relative).
Looks up the OcTreeKey corresponding to the coordinate and then calls updateNode() with it.
- Parameters
-
x y z log_odds_update value to be added (+) to log_odds value of node lazy_eval whether update of inner nodes is omitted after the update (default: false). This speeds up the insertion, but you need to call updateInnerOccupancy() when done.
- Returns
- pointer to the updated NODE
◆ updateNodeLogOdds()
|
virtualinherited |
update logodds value of node by adding to the current value.
◆ updateNodeRecurs()
|
protectedinherited |
◆ useBBXLimit()
|
inlineinherited |
use or ignore BBX limit (default: ignore)
◆ volume()
|
inherited |
◆ write() [1/2]
|
inherited |
Write file header and complete tree to file (serialization)
References OCTOMAP_ERROR_STR.
Referenced by main().
◆ write() [2/2]
|
inherited |
Write file header and complete tree to stream (serialization)
References octomap::AbstractOcTree::fileHeader, octomap::AbstractOcTree::getResolution(), octomap::AbstractOcTree::getTreeType(), octomap::AbstractOcTree::size(), and octomap::AbstractOcTree::writeData().
◆ writeBinary() [1/2]
|
inherited |
Writes OcTree to a binary file using writeBinary().
The OcTree is first converted to the maximum likelihood estimate and pruned.
- Returns
- success of operation
References OCTOMAP_ERROR_STR.
Referenced by main().
◆ writeBinary() [2/2]
|
inherited |
Writes compressed maximum likelihood OcTree to a binary stream.
The OcTree is first converted to the maximum likelihood estimate and pruned for maximum compression.
- Returns
- success of operation
References octomap::AbstractOcTree::prune(), octomap::AbstractOccupancyOcTree::toMaxLikelihood(), and octomap::AbstractOccupancyOcTree::writeBinaryConst().
◆ writeBinaryConst() [1/2]
|
inherited |
Writes OcTree to a binary file using writeBinaryConst().
The OcTree is not changed, in particular not pruned first. Files will be smaller when the tree is pruned first or by using writeBinary() instead.
- Returns
- success of operation
References OCTOMAP_ERROR_STR.
Referenced by octomap::AbstractOccupancyOcTree::writeBinary().
◆ writeBinaryConst() [2/2]
|
inherited |
Writes the maximum likelihood OcTree to a binary stream (const variant).
Files will be smaller when the tree is pruned first or by using writeBinary() instead.
- Returns
- success of operation
References octomap::AbstractOccupancyOcTree::binaryFileHeader, octomap::AbstractOcTree::getResolution(), octomap::AbstractOcTree::getTreeType(), OCTOMAP_DEBUG, OCTOMAP_WARNING_STR, octomap::AbstractOcTree::size(), and octomap::AbstractOccupancyOcTree::writeBinaryData().
◆ writeBinaryData()
|
virtualinherited |
Writes the data of the tree (without header) to the stream, recursively calling writeBinaryNode (starting with root)
Implements octomap::AbstractOccupancyOcTree.
◆ writeBinaryNode()
|
inherited |
Write node to binary stream (max-likelihood value), recursively continue with all children.
This will discard the log_odds_occupancy value, writing all leaves as either free or occupied.
- Parameters
-
s node OcTreeNode to write out, will recurse to all children
- Returns
◆ writeData()
|
virtualinherited |
Write complete state of tree to stream (without file header) unmodified. Pruning the tree first produces smaller files (lossless compression)
Implements octomap::AbstractOcTree.
◆ writeNodesRecurs()
|
protectedinherited |
recursive call of writeData()
Field Documentation
◆ bbx_max
|
protectedinherited |
◆ bbx_max_key
|
protectedinherited |
◆ bbx_min
|
protectedinherited |
◆ bbx_min_key
|
protectedinherited |
◆ binaryFileHeader
|
staticprotectedinherited |
◆ changed_keys
|
protectedinherited |
Set of leaf keys (lowest level) which changed since last resetChangeDetection.
◆ clamping_thres_max
|
protectedinherited |
◆ clamping_thres_min
|
protectedinherited |
◆ fileHeader
|
staticprotectedinherited |
Referenced by octomap::AbstractOcTree::read(), and octomap::AbstractOcTree::write().
◆ keyrays
|
protectedinherited |
data structure for ray casting, array for multithreading
◆ leaf_iterator_bbx_end
|
protectedinherited |
◆ leaf_iterator_end
|
protectedinherited |
◆ max_value
|
protectedinherited |
max in x, y, z
◆ min_value
|
protectedinherited |
min in x, y, z contains the size of a voxel at level i (0: root node). tree_depth+1 levels (incl. 0)
◆ occ_prob_thres_log
|
protectedinherited |
◆ ocTreeMemberInit
|
staticprotected |
to ensure static initialization (only once)
Referenced by OcTree().
◆ prob_hit_log
|
protectedinherited |
◆ prob_miss_log
|
protectedinherited |
◆ resolution
|
protectedinherited |
in meters
◆ resolution_factor
|
protectedinherited |
= 1. / resolution
◆ root
|
protectedinherited |
Pointer to the root NODE, NULL for empty tree.
◆ size_changed
|
protectedinherited |
◆ sizeLookupTable
|
protectedinherited |
◆ tree_center
|
protectedinherited |
◆ tree_depth
|
protectedinherited |
Maximum tree depth is fixed to 16 currently.
◆ tree_iterator_end
|
protectedinherited |
◆ tree_max_val
|
protectedinherited |
◆ tree_size
|
protectedinherited |
number of nodes in tree flag to denote whether the octree extent changed (for lazy min/max eval)
◆ use_bbx_limit
|
protectedinherited |
use bounding box for queries (needs to be set)?
◆ use_change_detection
|
protectedinherited |
The documentation for this class was generated from the following files:
- include/octomap/OcTree.h
- src/OcTree.cpp
